
Firmware Uploader
Robot's brain is in the firmware. Robots desire to have the most updated brain!
Please refer to the introduction for installing the Petoi Desktop App and connecting the robot to your computer.
Open the PetoiDesktopApp
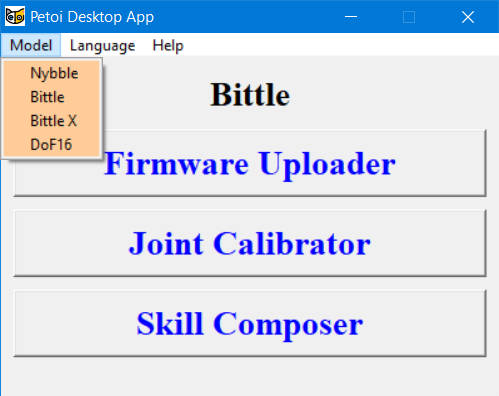
After properly connecting the mainboard with the computer via a USB data cable, open the PetoiDesktopApp (for Windows: UI.exe / for Mac: Petoi Desktop App), and select your Model and Language.
Menu bar in Petoi Desktop APP

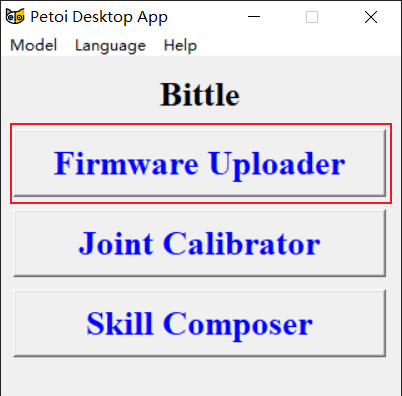
Click the Firmware Uploader button
Auto Detect the Serial Port
If there is no serial port or more than one serial port is detected by the desktop app:
After clicking the Firmware Uploader button, there will be a message box prompt as follows:
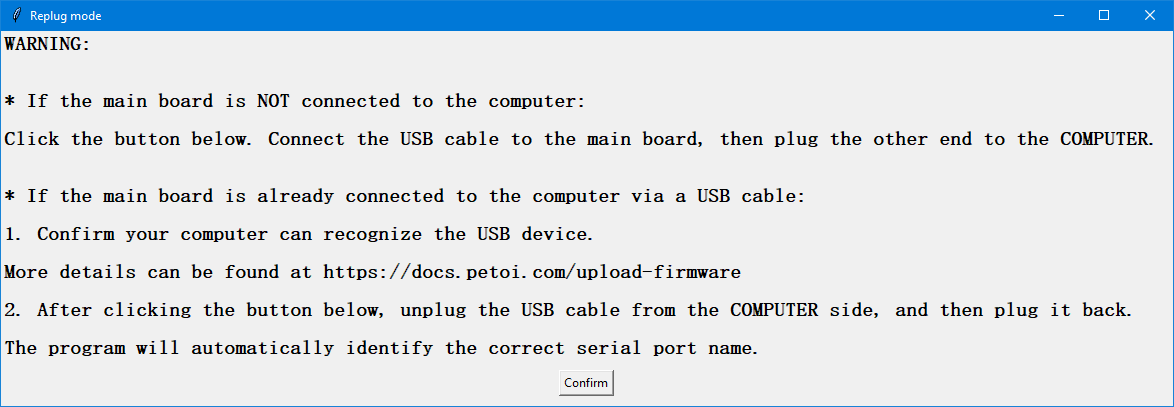
Please follow the prompts in the message box. After clicking the Confirm button, If you complete the prompts within 10 seconds, the desktop app will automatically identify the serial port name connecting the robot to the computer. If you complete the operation of unplugging and plugging the USB interface on the computer for more than 10 seconds, the desktop application will enter the manual selection of the serial port name mode:
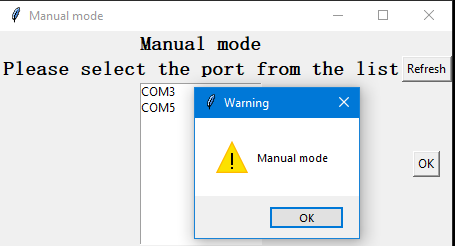
Click the OK button in the Warning message box first, then you can refresh the serial port list or select one of them (e.g. COM3) and click the OK button in the Manual mode window to open the Firmware Uploader interface as follows:

Once the Firmware Uploader interface is opened, you can also unplug and replug the USB cable from the COMPUTER side. The desktop app will automatically identify the serial port name used to connect the robot to the computer.

If you unplug the COM5 and replug it on the computer side, it will be discovered by the desktop app as follows:



Select the correct options to upload the latest firmware.
The 1.0 software won't work correctly with the Joint Calibrator, the Skill Composer, and other APIs. Use it only when you want to use the CodeCraft, a graphical coding interface provided by our partner, TinkerGen.
Product
Bittle (default)
Bittle X
Bittle X+Arm Nybble Nybble Q
Mode
Standard (default) RandomMind Voice Mind+ Camera Ultrasonic RandomMind_Ultrasonic Light Touch PIR Gesture IR distance
Because Bittle X running on BiBoard has more memory space, you only need to upload with the Standard mode firmware. Then you can switch between different modes via serial port commands. [1]
For NyBoard, these 12 modes can be selected. All of these modes apply to both Bittle and Nybble.
Software version
2.0 (default)
1.0
The 1.0 version is obsolete.
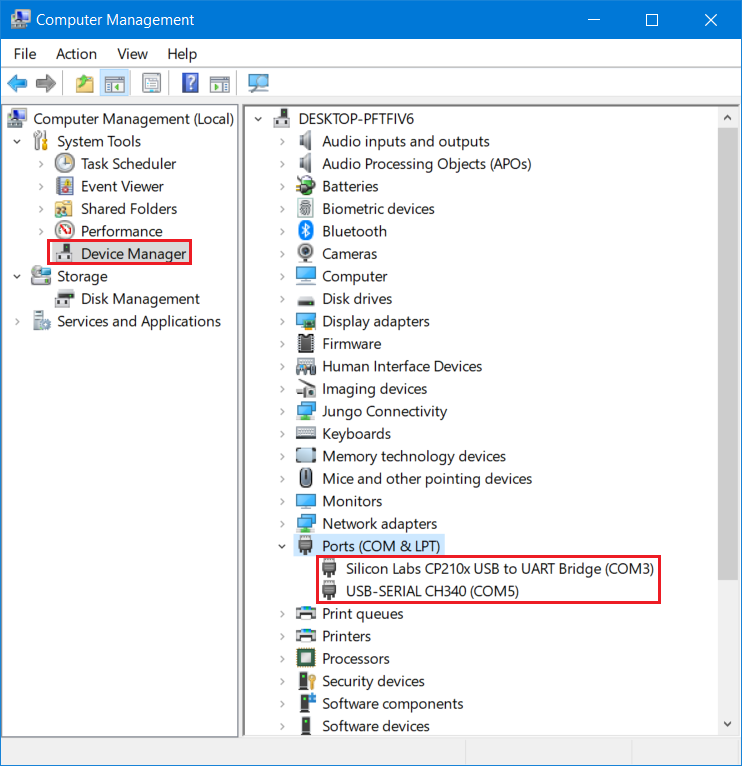
Serial port
Auto detection or by manual selection.
You can find the correct one through unplug and replug the USB socket on the computer side
Board version
NyBoard_V1_0 (default) NyBoard_V1_1 NyBoard_V1_2 BiBoard_V0_1
BiBoard_V0_2 BiBoard_V1_0
BiBoard_V0_1 or BiBoard_V0_2 is for Bittle X. BiBoard_V1_0 is for Bittle X V2 and Nybble Q.
[1] You can use the serial commands to switch modes for BiBoard: For BiBoard, Mind+ mode is supported by default, so it doesn't require a serial command to switch on. You can learn about the functionw of each module through the EXTENSIBLE MODULES.
There's no correlation between the board (hardware) version and the code (software) version.
Uploading options
Factory Reset After upgrading the firmware, the board will enter the initialization startup mode and ask whether to clear the joint calibration parameters and calibrate the IMU.
Upgrade the Firmware It will upgrade the firmware, skip the steps of clearing joint calibration parameters and the IMU calibration(it's equivalent of sending serial command "n"), and automatically enter the regular startup mode.
Update the Mode Only It has the same function as the Upgrade the Firmware at present.
Factory reset process
After clicking the Factory Reset button, the uploading process will start immediately. The board will enter the initialization startup mode after uploading the firmware. Some message windows will pop up in sequence for you to confirm or cancel:
Reset joint offsets? (Y/N)
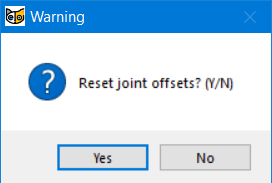
Select Yes, and the program will reset all servo calibration parameters to zero. The status bar will update the corresponding process and result in real time.
Select No to preserve the calibration value(so that you don't need to calibrate again if you have already done so).
Calibrate IMU? (Y/N)
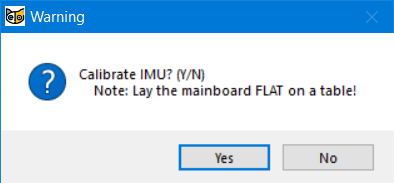
Select Yes, and the program will calibrate the gyroscope (IMU) to balance the robot correctly. The status bar will update the corresponding process and result in real time.
Select No, and the program will skip this step.
After that, the board will enter the regular startup mode.
Note:
Ensure the microcontroller is positioned horizontally for IMU calibration before clicking the "Yes" button.
Finish uploading the firmware
After the upload, the status bar will update the corresponding result, such as the success or failure of firmware uploading. If the uploading is successful, a message window of "Firmware upload complete!" will pop up simultaneously.
Note:
For NyBoard, when you open the software and upload the firmware for the first time, the program will first upload the "Parameters" firmware and then the "Main function" firmware.
After uploading the firmware, if the NyBoard or BiBoard V1 is not connected to the battery and powered on, you will hear repetitive descending melodies, indicating that the battery is low or disconnected. You need to connect the battery and turn on its power.
Check the log
From the desktop app version 1.2.7, the log information will be output in the console box at the bottom of the interface:

You can directly click the Copy button to copy all the log information, or you can first select specific key information in the console output box with your mouse, then click the Copy button to copy only that portion of the log information, and then paste this information into an email and send it to support.petoi.com for assistance.
For the old version of the desktop app, if the upload fails, the following message box will pop up:
the log file is located at:
For Windows: The log file is in the same directory as UI.exe

For macOS: You can check the log file as follows:


When you contact our [email protected], please attach the log file to your email.
Run Firmware Uploader in the terminal
There may be some OS platform compatibility issues with different computers.
You can still run the app directly from your terminal:
Go to OpenCat/pyUI/ in your terminal.
Install PySerial and Pillow for your Python installation. You may get a clean Anaconda environment and
pip3 install pyserial pillowRun
python3 UI.py
For NyBoard, the firmware uploader calls the application avrdude to upload firmware files to the microcontroller.
For BiBoard, the firmware uploader calls the application esptool to upload firmware files to the microcontroller.
Linux OS
For Linux system users, in addition to the above steps, you also need to perform the following steps:
1. Install avrdude
Fedora: dnf install avrdude
CentOS: yum install avrdude
Debian / Ubuntu: apt install avrdude
2. Modify the variable avrdudeconfPath in FirmwareUploader.py
Fedora / CentOS :
avrdudeconfPath = '/etc/avrdude/'Debian / Ubuntu :
avrdudeconfPath = '/etc/'
If you have experience with the Arduino IDE, you will see the same log message when uploading.
For the BiBoard, please review the Upload Sketch for BiBoard.
For the NyBoard, please review the Upload Sketch for NyBoard.
Last updated